Cross-Tool and Cross-Behavior Perceptual Knowledge Transfer
for Grounded Object Recognition
for Grounded Object Recognition

Download Dataset
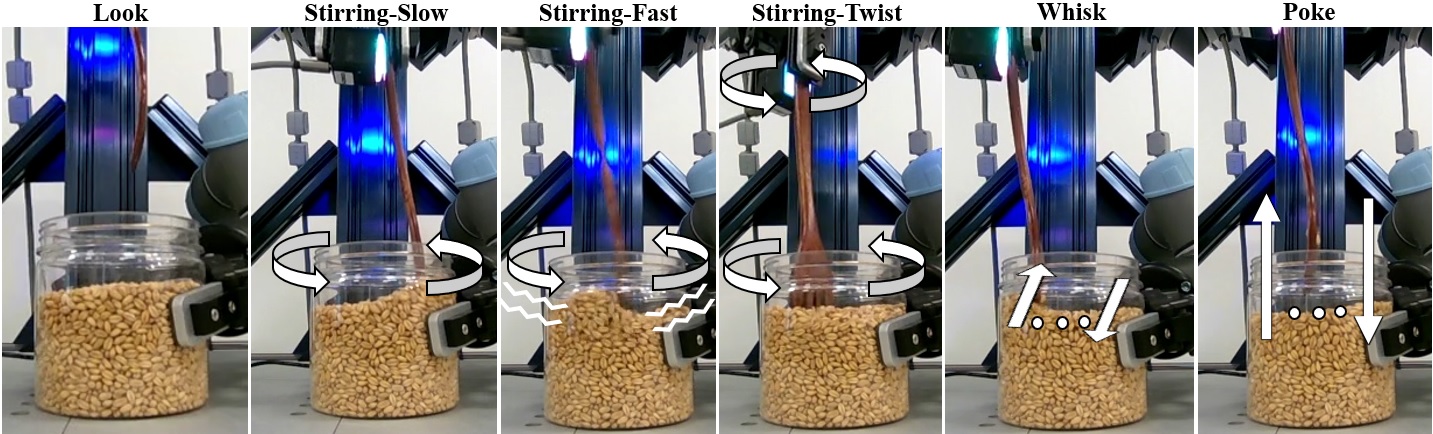
In this dataset UR5 robot used 6 tools: metal-scissor, metal-whisk, plastic-knife, plastic-spoon, wooden-chopstick, and wooden-fork to perform 6 behaviors: look, stirring-slow, stirring-fast, stirring-twist, whisk, and poke.
The robot explored 15 objects: cane-sugar, chia-seed, chickpea, detergent, empty, glass-bead, kidney-bean, metal-nut-bolt, plastic-bead, salt, split-green-pea, styrofoam-bead, water, wheat, and wooden-button kept cylindrical containers.
The robot performed 10 trials on each object using a tool, resulting in 5,400 interactions (6 tools x 6 behaviors x 15 objects x 10 trials).
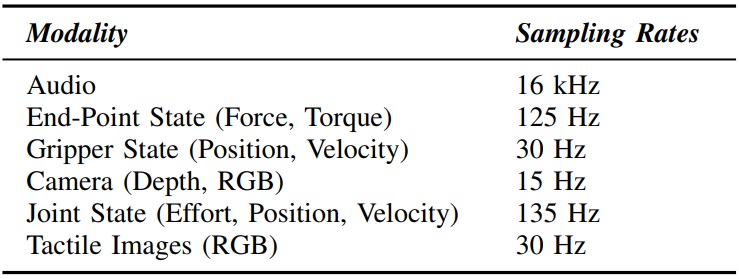
The robot records multiple sensory data (audio, RGB images, depth images, haptic, and touch images) while interacting with the objects.Sensors
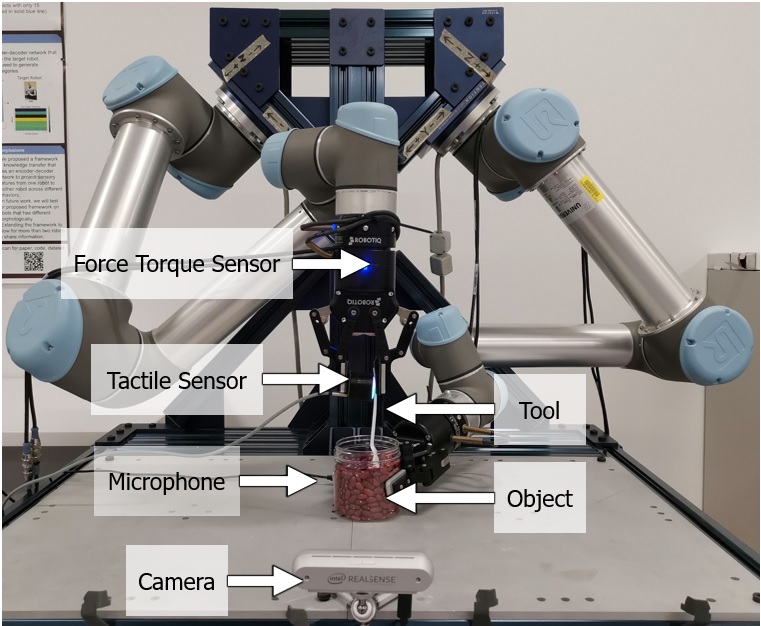
Sampling Rates
Exploratory Behaviors
Objects
