Transferring Implicit Knowledge of Non-Visual Object Properties
Across Heterogeneous Robot Morphologies
Across Heterogeneous Robot Morphologies
Download Dataset
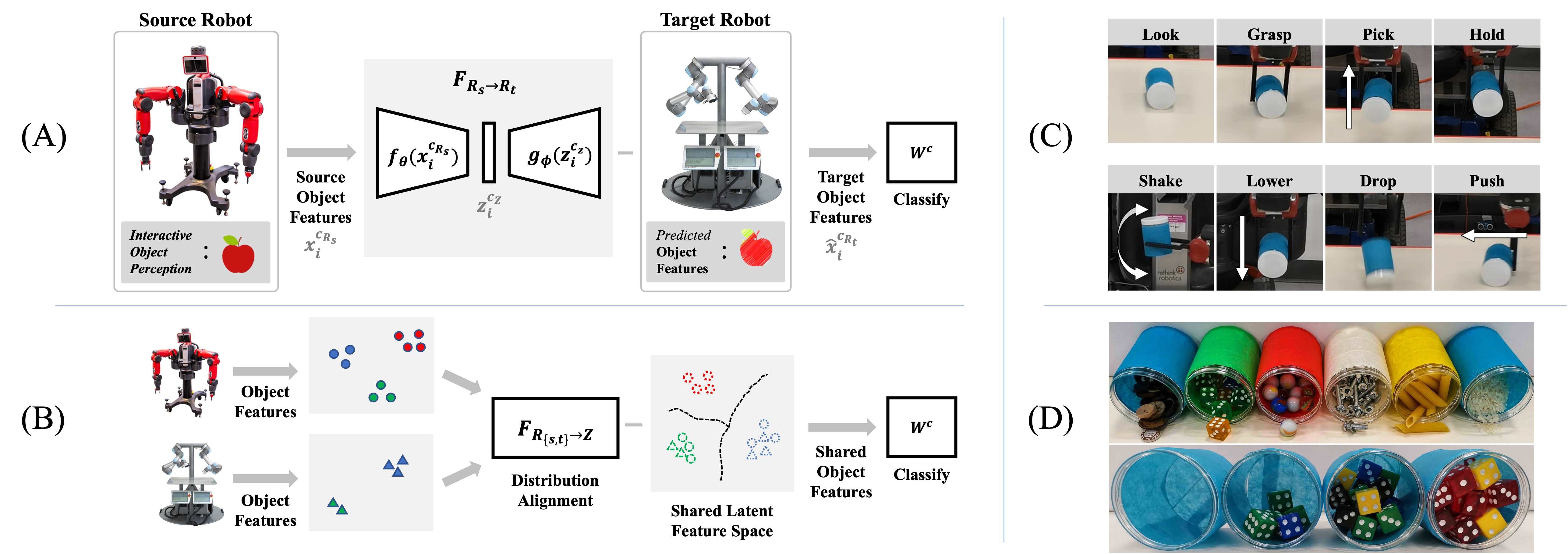
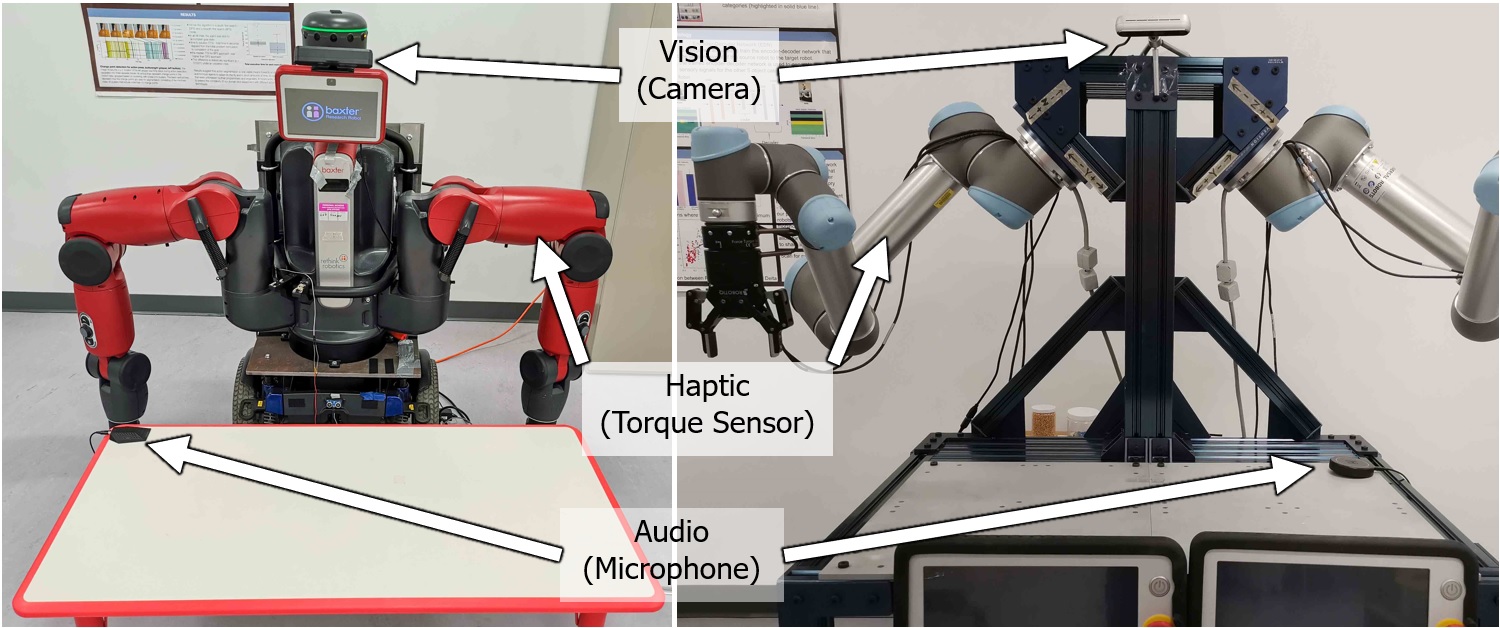
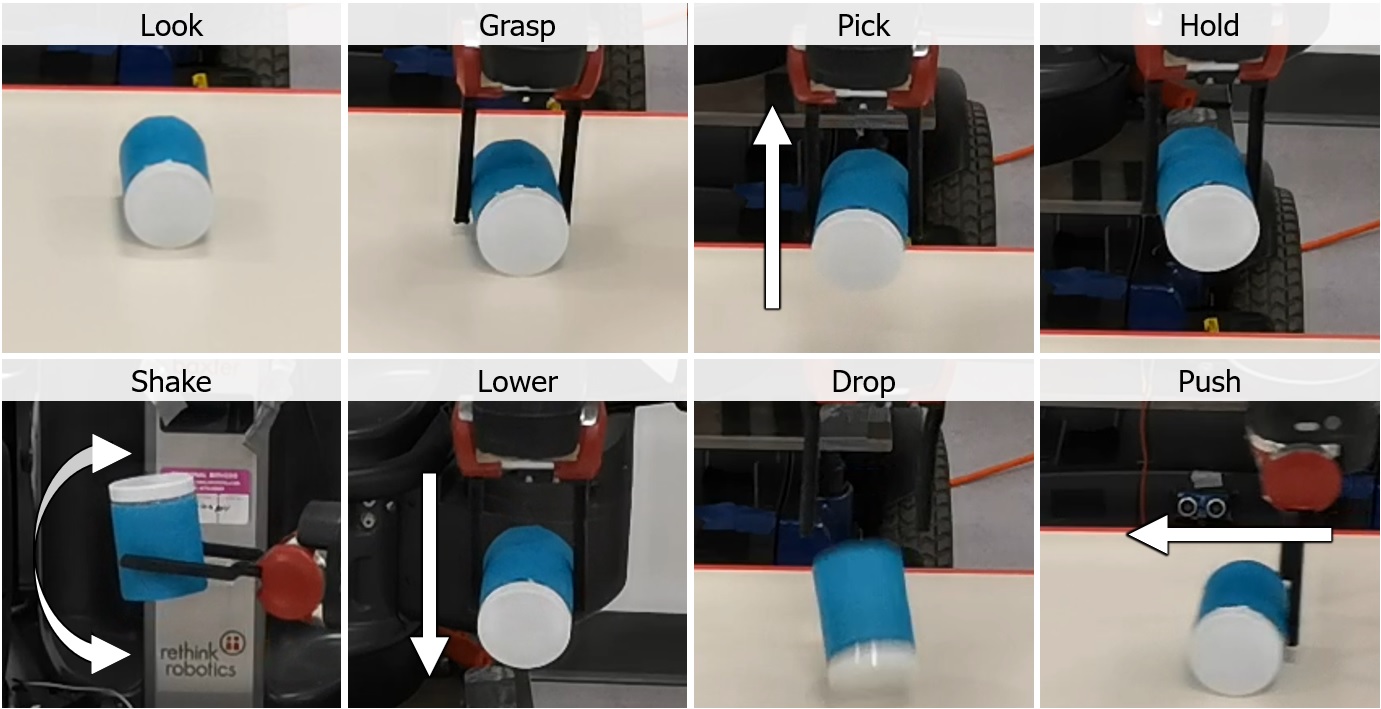
In this dataset two robots, Baxter and UR5, perform 8 behaviors (look, grasp, pick, hold, shake, lower, drop, and push) on 95 objects that vary by 5 color (blue, green, red, white, and yellow), 6 contents (wooden button, plastic dices, glass marbles, nuts & bolts, pasta, and rice), and 4 weights (empty, 50g, 100g, and 150g). There are 90 objects with contents (5 colors x 3 weights x 6 contents) and 5 objects without any content that only vary by 5 colors. Both robots perform 5 trials on each object, resulting in 7,600 interactions (2 robots x 8 behaviors x 95 objects x 5 trials).Sensors
Sampling Rates

Exploratory Behaviors
Objects


